第十三屆中國頁巖油氣發展大會
探索超深層頁巖油氣破解非常規技術瓶頸
9月12-13日 成都世紀城國際會議中心
·重磅嘉賓·

重磅嘉賓
劉清友 成都理工大學黨委書記
劉清友,博士(博士后)、教授、博士生導師,教育部長江學者特聘教授、國家首批“萬人計劃”領軍人才,油氣藏地質及開發工程全國重點實驗室副主任,主要從事石油鉆頭及裝備的理論、實驗、產品及應用研究。先后主持國家科技重大專項、國家973、國家863、國家自然科學基金項目等近20項。發表論文180余篇(第一/通訊作者125篇),授權發明專利66件(美國專利7件、加拿大專利3件),出版專著6部,制訂標準2項。獲國家科技進步特等獎1項、國家科技進步二等獎2項、省部級科技一等獎8項;并獲首屆全國創新爭先獎、中國工程院光華工程科技獎、何梁何利基金科學與科技進步獎等。
演講主題
頁巖氣超長水平井鉆完井機器人研究進展
① 鉆井機器人
② 連續油管作業機器人
③ 定向系統
④ 智慧鉆頭
近期,成都理工大學的一項重大科研突破——“最新頁巖氣壓裂機器人的研發成功”,在業界引起了廣泛關注,為實現儲層的充分改造、提高油氣開采率提供了新的思路。
在第十三屆中國頁巖油氣發展大會上,成都理工大學黨委書記劉清友教授將帶來《頁巖氣超長水平井鉆完井機器人研究進展》的專題演講,從最新技術角度出發,鉆井機器人、連續油管作業機器人、定向系統、智慧鉆頭四方面深入解析這一創新成果,為與會者呈現頁巖油氣開發領域的最新進展和未來趨勢,讓我們敬請期待!
·關于最新頁巖氣壓裂機器人·

從成都理工大學獲悉,該項目是由成都理工大學能源學院(頁巖氣現代產業學院)副院長朱海燕教授帶領研發團隊首次提出將水平油氣井下牽引機器人與靶向爆炸-水力復合壓裂方法結合,研發的井下燃爆壓裂機器人實現了油氣井下機器人的牽引力及牽引速度等各項性能指標的全球領先,為解決小空間、低信號等復雜井下作業環境難題提供新的解決路徑。
“目前,我國油氣勘探開發對象由傳統中高滲油藏,發展到低滲透直至致密等非常規資源,資源開采難度增大,面對日益復雜的勘探對象,創新儲層改造技術是發現資源和增加儲量的必經之路。”朱海燕介紹道,但我國開發技術裝備受制于人,原創性、引領性、顛覆性技術相對偏少,尤其是對水平井智能化開采及燃爆壓裂的設備亟需創新。

朱海燕教授團隊參加機器人中試
“因此,學校利用學科優勢和優質實驗平臺,積極開展圍繞井下機器人技術、結構、信號控制方面的綜合研究。”據介紹,朱海燕教授團隊主要針對非常規油氣水平井壓裂的復雜井下情況進行壓裂的難點攻克,致力于在致密的地層中構建油氣的“高速公路”。地層越往深,勘探開發難度越大,井下燃爆壓裂機器人需要在微小井眼中“撐得住、拖得動、行得穩。”
朱海燕教授團隊研發的井下燃爆壓裂機器人能夠攜帶連續油管安全高效往返狹小井下,打通“高速路線”;其在盡可能大的牽引力下,能夠攜帶更多的燃爆劑,形成破碎帶,創造多個“高速路口”;也能在超高溫高壓下控制其靈敏返回的同時,進行水力壓裂,擴大“高速公路”的范圍。為實現儲層的充分改造、提高油氣開采率提供了新的思路。
據介紹,團隊首創的復雜井筒自適應井下牽引機器人結構,攻克了12cm直徑狹小空間設計的世界難題,為機器人實現更大的牽引力、穩定控制提供必要基礎。為了使微小井眼水平井連續油管鉆機器人在井下更好控制,團隊還研發了能夠對鉆井機器人的速度進行無線遠程控制的控制系統,“也就是一種微型液壓控制系統”,朱海燕說。在信號傳輸方面的相關研究的進展中,團隊也開發了基于雙向生成對抗神經網絡的參數識別與測控系統,攻克了數千米地下信號傳輸差的世界難題,實現了的信號的實時傳輸。
據了解,近年來受鉆完井技術及井下智能作業裝備的進步影響,在非常規油藏開發方面,為達到增產和提高采收率的目的,水平井的開采方式已經是替換原有開發手段的重要方法,也處于研究的焦點。“比如復雜裂縫在擴展過程中怎么去監測、反演和施工參數優化,特別是壓后的反演,裂縫形態到底是什么樣?如何考慮動態地應力場的問題,也就是母井和新井之間的干擾、新壓裂的井上層和下層之間的干擾等?針對我國儲層特點,如何對傳統壓裂進行改造升級?通過不斷地技術創新和多領域合作發展,對后續非常規油藏的高效開發具有重要指導意義。”朱海燕說。
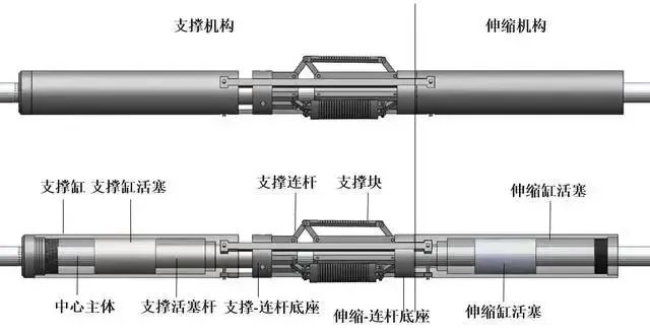
機器人主要作業部位三維展示
團隊研發的井下燃爆壓裂機器人能夠攜帶連續油管安全高效往返狹小井下,打通“高速路線”;其在盡可能大的牽引力下,能夠攜帶更多的燃爆劑,形成破碎帶,創造多個“高速路口”;也能在超高溫高壓下控制其靈敏返回的同時,進行水力壓裂,擴大“高速公路”的范圍。為實現儲層的充分改造、提高油氣開采率提供了新的思路。
據介紹,團隊首創的復雜井筒自適應井下牽引機器人結構,攻克了12cm直徑狹小空間設計的世界難題,為機器人實現更大的牽引力、穩定控制提供必要基礎。為了使微小井眼水平井連續油管鉆機器人在井下更好控制,團隊研發了能夠對鉆井機器人的速度進行無線遠程控制的控制系統,“也就是一種微型液壓控制系統”,朱海燕說。在信號傳輸方面的相關研究的進展中,團隊也開發了基于雙向生成對抗神經網絡的參數識別與測控系統,攻克了數千米地下信號傳輸差的世界難題,實現了的信號的實時傳輸。
近年來,受鉆完井技術及井下智能作業裝備的進步影響,在非常規油藏開發方面,水平井的開采方式已經是替換原有開發手段而達到增產和提高采收率的重要方法。目前,非常規油藏采用長井段的水平井與大面積的體積壓裂的改造方式進行開發處于研究的焦點。
“比如復雜裂縫在擴展過程中怎么去監測、反演和施工參數優化,特別是壓后的反演,裂縫形態到底是什么樣?如何考慮動態地應力場的問題,也就是母井和新井之間的干擾、新壓裂的井上層和下層之間的干擾等?針對我國儲層特點,如何對傳統壓裂進行改造升級?通過不斷地技術創新和多領域合作發展,對后續非常規油藏的高效開發具有重要指導意義。”朱海燕說。(內容來源于封面新聞。)


 官方微博
官方微博 官方微信
官方微信

